Antes de profundizar en las características de un instrumento de medición, es importante saber que son los instrumentos de medición y las funciones que cumplen.

Un instrumento de medición es un dispositivo que se utiliza para medir una cantidad física. Sus funciones principales son medir, registrar, comparar y controlar estas cantidades físicas. Los instrumentos de medición son esenciales en muchos campos ya que permiten mediciones precisas y confiables de cantidades físicas. Sin embargo, no existen instrumentos de medición ideales, por consiguiente, poseen una serie de limitaciones las cuales debemos tomar en cuenta a la hora de usar dichos instrumentos.
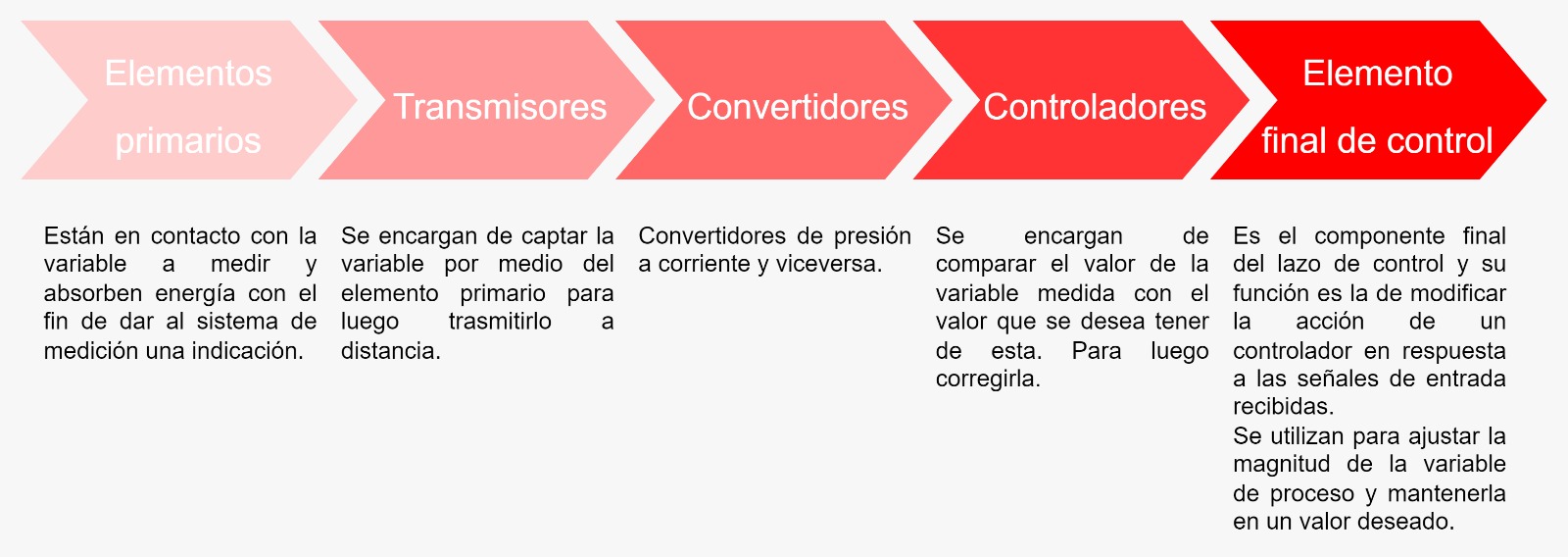
Clases de instrumentos.
.jpeg)

Características estáticas.
Estas características describen el comportamiento de un sensor o cualquier sistema de medida bajo una magnitud constante (en este caso la magnitud a medir) o esta varia tan lento que puede considerarse constante. Las características estáticas son:
- Curva de calibración. La curva de calibración es una representación gráfica que muestra la relación entre la señal de entrada que se le da a un sistema de medición y la señal de salida que se produce como resultado. La curva de calibración es útil porque proporciona una forma de predecir la señal de salida en función de la señal de entrada, lo que permite una medición más precisa y confiable de la cantidad física que se está midiendo.

- Campo o margen de medida. Corresponde al conjunto de valores que se encuentran entre la medida superior e inferior en la cual puede operar el sistema de medida.

- Alcance o fondo de escala (span) / Salida a fondo de escala. El fondo de escala es la diferencia entre los limites superior e inferior de medida (eje x) y la salida a fondo de escala es la diferencia entre las salidas para los extremos del campo de medida (eje y). Se pueden observar en la figura 2.
- Sensibilidad. Es la pendiente de la curva de calibración, si esta es constante se dice que el sistema de medida es lineal. Se puede visualizar en la figura 1.
- No linealidad. Es la máxima desviación de la curva de calibración respecto a la recta a la que se aproximo, usualmente se representa con un porcentaje y se da a partir de la ecuación de la figura 3.

- Zona muerta (dead zone). Corresponde a la zona donde se varía los valores del sistema y esta variación no produce una variación en la salida. También se denomina sensibilidad nula.

- Histéresis. Se refiere a la discrepancia en las lecturas del instrumento para la misma cantidad física cuando se mide en diferentes direcciones. Esto significa que el valor medido por el instrumento depende de la dirección en la que se realiza la medición y no solo de la cantidad física medida.

- Resolución. Al tener un incremento mínimo en la variable de entrada, se obtiene un cambio medible en la salida. Mientras esto sea mas notorio, mayor es la resolución.
- Precisión / Exactitud. Sencillamente, la precisión es el grado de concordancia entre los resultados y la exactitud es el grado de concordancia entre el valor exacto y el valor medido.

- Repetibilidad / Reproductividad. La repetibilidad es el grado de concordancia entre los resultados de mediciones obtenidos sucesivamente y la reproductividad es el mismo grado de concordancia, pero las mediciones se hacen bajo distintas condiciones o a largo plazo.
- Calibración. consiste en ajustar y verificar su precisión y fiabilidad al medir una cantidad física específica. Se compara con un estándar de medición trazable y confiable para ajustar el instrumento y proporcionar mediciones precisas y confiables.
- Calibración a punto: Actuar sobre cada punto con el fin de que dichos puntos sean lo mas exacto posible.
- Calibración del cero y de la sensibilidad:

- Gama y escala. La gama es la diferencia entre la mayor y menor indicación del instrumento y esta puede estar dividida en diferentes escalas.

Características dinámicas.
Estas características definen el comportamiento de los sensores o sistemas de medida bajo una entrada variable. Por tanto, la salida también va a variar pero con un retraso.

Comentarios
Publicar un comentario